|
So, from what Galileo discovered, we learned that we do not
need numerical integration to solve the simple ODE
D(D(u) = -g.
If the initial height at time zero is denoted u(0),
and the ball is dropped (initial velocity is zero),
the height at time t is given by
u(0) - g * t^2 / 2
However, in spite of the fact that we have a simple
algebraic expression for the solution of the ODE,
we use numerical integration to do the solve.
This makes it relatively easy to handle additional terms
describing effects like air resistance --- which is related
to the downward or upward velocity of the ball.
Note that if the ball is still, there are no forces on it.
The ball has to be moving for air resistance force to be generated.
Hence a mathematical expression for the air resistance will
involve numbers for motion of the ball, such as velocity, and the height
of the ball plays no part in the expression for deceleration due to
air resistance (if the range of heights is relatively small).
(Of course, height can play a part --- for example,
when we are dealing with different air density at different heights
--- or different wind currents at different heights.)
If air resistance is proportional to the magnitude
of the velocity or to the velocity squared or some
combination of the two, then we can use numerical
integration to solve a differential equation that
may look something like
D(D(u)) = -g -k1*D(u) -k2*sign(D(u))*D(u)^2
where D(u) represents the signed velocity of the ball.
Although this equation still does not explicitly involve
the mass of the ball, note that the constants
of resistance, k1 and k2, will surely depend on
factors like the profile of the ball, like its
radius, and the density of the air.
In some situations, mass of the falling object WILL
come into play.
If we were simulating a feather-weight
falling object, we would find that the density of
the air versus the density of the falling object would
have a definite effect on the deceleration of the object.
Think of a falling ping-pong ball versus a golf ball.
For now, I aim to simulate the no-air-resistance case.
MODELLING THE BOUNCE
(in an algebraic way, rather than using
an extremely 'stiff' differential equation
to model what happens during a nearly
instantaneous bounce)
We model the bounce by switching the velocity direction
of the ball when it strikes the surface --- when height
u is less than or equal to the radius of the rigid ball
--- so the velocity D(u) is set to -D(u).
To allow for modeling a ball that is losing height
with each bounce because of a loss of some momentum
with each impact with the surface, we introduce
a positive constant k which is less than or equal to 1.
When we switch the direction of the velocity, we also
reduce the velocity magnitude by the factor k.
Hence the velocity D(u) becomes -k*D(u) at each bounce.
GOALS FOR THE GUI:
The GUI should allow the user to enter various values for
g (gravity) and k (velocity adjustment at each bounce).
(Note that the differential equation D(D(u)) = -g does
not involve mass --- as mentioned above.
So we do not have to prompt for mass on the GUI.)
To be able to do the numerical integration of the
2nd order ODE, we need a couple of initial conditions
for the displacement u and the velocity D(u).
The GUI should allow the user to enter four parameters
for the solver process:
-
an initial vertical height of the ball
-
an initial vertical velocity
(zero for a ball that is dropped rather than thrown)
-
an end-time for the end of the solution process
-
a time-step, h, for the solution process.
Following a solution run, the GUI should also allow the
user to start (and stop) an animation of the bouncing
ball drawn on a Tk canvas.
The moving ball is to be shown on a square Tk 'canvas' widget,
centered in a rectangular image-area --- by using 'create oval'
and 'delete' commands on the Tk 'canvas' widget.
---
To evaluate any further requirements that we may need for the GUI,
it is helpful to know some of the details of
Those details follow.
METHOD - MATH MODELLING OF THE BOUNCING BALL MOTION :
To make the problem compatible with numerical integration methods,
we convert the single 'second order' differential equation
D(D(u)) = -g
to two differential equations with
u1 = u = displacement and u2 = D(u) = velocity as the functions of t
to be generated by integrating 2 'first order' differential eqns:
starting from initial conditions u1=A and u2=B, where A is an
initial vertical height and B is an initial vertical velocity.
The common way of expressing these kinds of systems of
first order differential equations in compact, general form is
D(u) = f(t,u)
where u and f are N-dimensional vectors.
This is a compact way of expressing a system of scalar
differential equations:
D(u1) = f1(t,u1,...,uN)
D(u2) = f2(t,u1,...,uN)
. . . . . . . . . . .
D(uN) = fN(t,u1,...,uN)
In the case of these bouncing ball equations, N=2, and
we can think of solving for the unknown function vector
(u1(t),u2(t)) where the right-hand-side (RHS) of the
two equations above can be thought of as a special
case of a more general user-specified function vector
(f1(t,u1,u2),f2(t,u1,u2))
where
f1(t,u1,u2) = u2
f2(t,u1,u2) = -g
We use the popular Runge-Kutta 4th order method (RK4) to
perform the numerical integration for a user-specified
time step, h.
We basically use two procs to perform the integration
steps:
-
a proc to perform the RK4 integration for N=2.
This proc yields the values of (u1,u2) for each time step.
-
a proc to evaluate the RHS function (f1,f2)
for specified values of t,u1,u2.
The latter proc ('deriv', say) is called several times by the
former proc ('rk4', say) for each time step.
METHOD - PLOTTING THE ANIMATION ON THE TK CANVAS :
After a solution, we have the solution functions
u1 and u2 for a sequence of (equally-spaced) time values.
We could use a more complex Runge-Kutta method --- such as
Runge-Kutta-Fehlberg --- to get a solution with
potentially unequally-spaced time values.
We use function u1 (height of the ball) to do the animation.
For each time value, t(i), the bouncing ball is drawn
as a simple color-filled circle representing the ball.
The GUI provides 2 buttons by which the user can specify
the 2 colors for:
An 'animate' proc performs the bouncing ball animation when
the user clicks on the 'Start' radiobutton of the GUI.
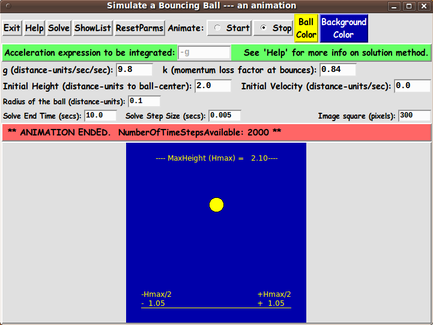
This 'animate' proc uses the 'world-coordinates' --- the
values of height u1 --- to draw the bouncing ball within
a square area of about Hmax-by-Hmax in world coordinates,
where Hmax is the maximum height, over the surface on which
the ball bounces, reached by the ball during a solve run.
We use u1 to represent the location of the center of the ball,
so we need to adust the max height of the bounce by the
radius of the ball to accomodate the top half of the ball.
We think of Hmax, below, as representing that 'augmented' height.
We think of the ball bouncing up and down in the y-direction,
with no 'side' forces on the ball in the x-direction.
Hence the x-coordinate of the location of the ball stays constant.
We imagine the Hmax-by-Hmax square to have an xy-coordinate
system overlaid on it such that the origin (0.0,0.0) is
at the middle of the bottom of the square.
In other words,
the y-coordinate of the square goes from 0.0 at the bottom of
the square to Hmax at the top of the square --- and the x-coordinate
goes from -Hmax/2 at the left side of the square to +Hmax/2
at right side of the square.
We think of the bottom of the path of the center of the rigid,
extremely hard bouncing ball (non-squishable, like a golf ball)
as being above the origin --- (0.0,ball-radius).
We use the height function u1(t(i)) of the center of the ball to set
the y coordinate of the location of the center of the
bouncing ball, and we keep the x-coordinate of the (x,y)
position of the center of the ball at 0.0 --- the x-mid-point
of the square.
Note that the x,y coordinates of the upper-left corner of the
square are (-Hmax/2,+Hmax) and the lower-right corner of the
square is at (+Hmax/2, 0.0).
The Hmax-by-Hmax area allows for the bouncing ball to bounce
to extremes --- from height zero to height Hmax.
A proc is provided which maps the plot area limits in
world coordinates --- say
to the corners of the plot area in pixel coordinates:
We use values a little larger than Hmax and a little smaller
than 0.0 for the world coordinate height limits --- to allow for a little
margin at the top and bottom of the path of the bouncing ball.
To get a square image area, we use ImageWidthPx=ImageHeightPx
and we determine this number of pixels by allowing the user
to specify the integer value in an entry widget on the GUI.
The animate proc uses 2 procs --- Xwc2px and Ywc2px ---
to convert the world coordinates of each point --- such as the
location of the center of the bouncing ball --- to pixel coordinates.
The pixel-coordinates are used in the 'create oval' command
to redraw the bouncing ball on the Tk canvas, for each time step.
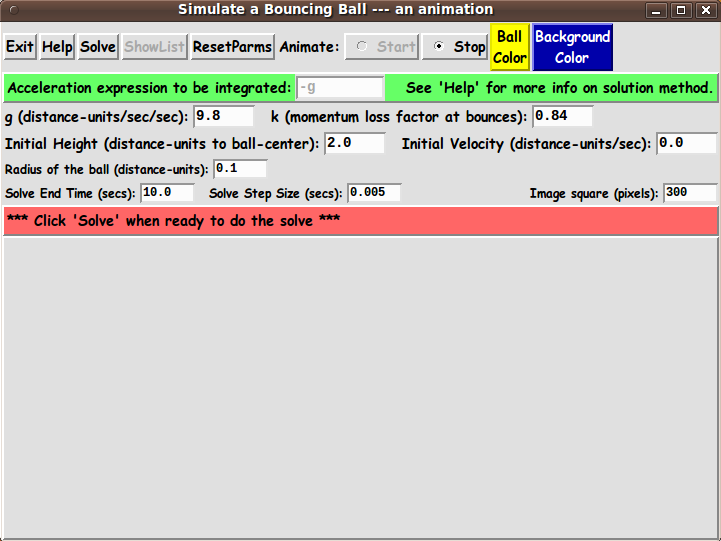
THE GUI LAYOUT :
From the discussion above, we see that the Tk GUI should
allow the user to specify
There is to be a 'Solve' button to perform a solution
when the user is ready to use these parameters.
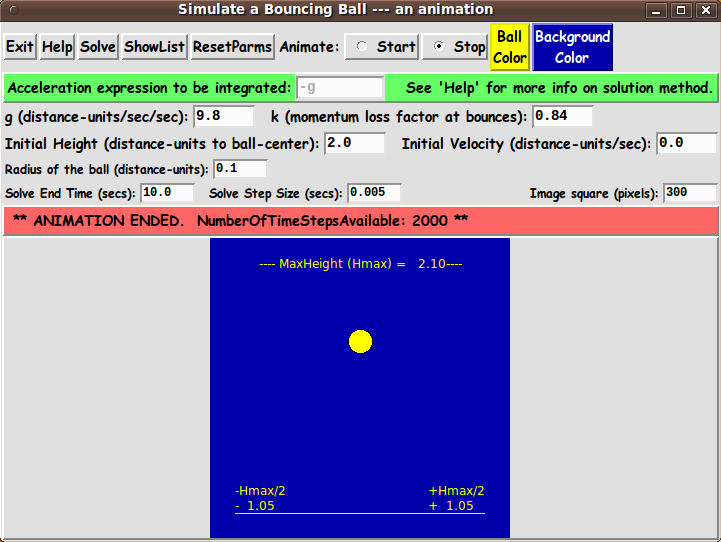
A 'ShowList' button can be used to show the list of
solution values --- triplets t(i), u1(t(i)), u2(t(i)) ---
in a popup window.
There are also to be 2 buttons by which to call up an
RGB-color-selector GUI by which to specify the 2 colors
for the animation drawing on the canvas.
In addition, on the GUI, there are to be 'Start' and 'Stop'
radiobuttons to start and stop an animation run.
To allow the user to speed-up or slow-down the animation,
there could be a Tk widget ('entry' or 'scale') by which to specify
a wait-time (in millisecs) between computing and displaying
each new bouncing ball position.
This would be an alternative to using a wait-time value
calculated from the user-selected time-step, h.
For now, we simply calculate the animation wait-time
based on the time-step, h.
---
One way the user can specify all these parameters is indicated by
the following 'sketch' of a layout for the GUI:
In the following sketch of the GUI:
|